Beispiel 08 Bewegungsdesign für zwei überlagerte Antriebe an einer Einlege-Einrichtung 3.8
Mit dem zunehmenden Einsatz von elektronisch gesteuerten Servo-Antrieben (Motion Control Systemen), nicht nur für Antriebsstränge mit linearer, sondern auch mit nichtlinearer Bewegungsübertragung wie Koppelgetrieben, gewinnt optimiertes Bewegungsdesign mehr und mehr an Bedeutung. Früher lediglich als ein Arbeitsschritt bei der Auslegung von Kurven-Übertragungsgetrieben betrachtet in Form der Auswahl bestimmter "Bewegungsgesetzte" (z. B. gemäß der VDI-Richtlinie 2145) ist Bewegungsdesign heute als eigenständige Disziplin und zunächst unabhängig von der späteren Realisierung der ausgelegten Soll-Bewegungsverläufe zu sehen. Ein bewährtes Hilfsmittel ist dabei der Ansatz des interaktiven Bewegungsdesigns mit intuitiver Modifikation verketteter Polynomabschnitte, das in
GENESYS
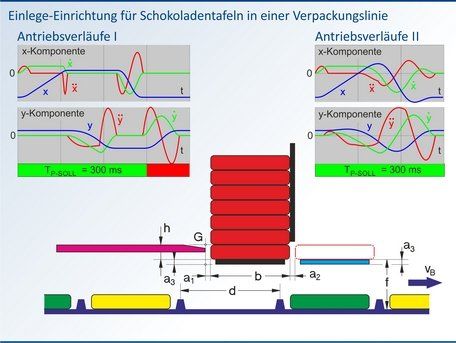
gezielt unterstützt wird. Ein Beispiel - noch "ohne Getriebetechnik", also ohne Einbeziehung ungleichmäßig übersetzender Getriebe - zeigt die hier betrachte Einrichtung zum Einlegen (oder besser "Einwerfen") von Schokoladentafeln aus einem Stapel in Fächer eines laufenden Förderbandes in einer Verpackungslinie. Ein nicht dargestellter Kreuzschlitten mit separaten Antrieben für die horizontale und die vertikale Bewegungskomponente führt die violette Schieberzunge so, dass diese die unterste Tafel aus dem Stapel herausschiebt und auf Bandgeschindigkeit beschleunigt, dann den auf ihrem Rücken lastenten Stapel absetzt, unter dem Stapel zurück fährt und nach einer vorgeschriebenen Pause den Bewegungszyklus wiederholt. Für die einzelnen Bewegungsabschnitte sind dabei eine Reihe von Grenzwerten bezüglich maximal zulässiger Geschwindigkeiten und Beschleunigungen einzuhalten. Die Antriebsverläufe I realisieren diese Anforderungen eher schlicht als rein sequentielle Abfolge von Bewegungsabschnitten mit abwechselnd nur horizontaler und nur vertikaler Bewegung, im Ergebnis also einem rechteckigen Bahnverlauf für die Spitze der Schieberzunge. Die insgesamt benötigte Taktzeit summiert sich so auf 400 ms. Eleganter ist die Lösung II, bei der alle Möglichkeiten der erlaubten Überlappung von horizontalen und vertikalen Bewegungsabschnitten berücksichtigt und zulässige Toleranzen bezüglich der Soll-Vorgabe geschickt ausgenutzt wurden. Als Überlagerungsergebnis der so - abgestimmt aufeinander, aber jeweils für sich - gestalteten vertikalen und horizontalen Antriebsbewegung erhält man eine ovalartige Bahnkurve der Schieberspitze und eine auf nur noch 300 ms reduzierte Taktzeit. Der Animationsfilm zeigt diese optimierte Bewegungsvariante.